I – Giới thiệu
Tilt meter để đo độ nghiêng (trong đo lường) được dùng để tính toán và định lượng góc xoay hay độ lún của tòa nhà hay kết cấu.
Có những loại Tiltmeter phổ biến thường được sử dụng:
- In-Place Tilt Meter
- Portable Tilt Meter
- Submersible Tilt Meter
- Tilt Beam
|
1. In-Place Tilt Meter |
.png) |
+ Bao gồm một lớp vỏ nhỏ bảo vệ bảng mạch được in (PCB) bên trong, và trên đó được gắn một đầu đo gia tốc dạng Mems loại 1 trục hoặc 2 trục.
+ PCB được trang bị một hệ thống điều khiển tín hiệu phức tạp để đảm bảo tín hiệu đầu ra ổn định và tính lặp.
+ Được thiết kế để đo độ nghiêng, chúng được gắn vào tấm gá được bắt vít cố định vào kết cấu đo. |
|
2. Portable Tilt Meter |
.png) |
+ Bao gồm một lớp vỏ nhỏ bảo vệ bảng mạch được in (PCB) bên trong, và trên đó được gắn một đầu đo gia tốc dạng Mems loại 2 trục, cáp kết nối, đĩa đo nghiêng và bộ đo tín hiệu.
+ PCB được trang bị một hệ thống điều khiển tín hiệu phức tạp để đảm bảo tín hiệu đầu ra ổn định và tính lặp.
+ Được thiết kế để đo độ nghiêng bằng cách gắn các đĩa đo nghiêng lên kết cấu sau đó đặt bộ đo lên đĩa để tiến hành phép đo. |
|
3. Submersible Tilt Meter |
.png) |
+ Bao gồm lớp vỏ bảo vệ chống nước (IP68) được gắn bảng mạch in (PCB) bên trong, và trên đó được gắn một đầu đo gia tốc dạng Mems loại 1 trục hoặc 2 trục .
+ PCB được trang bị một hệ thống điều khiển tín hiệu phức tạp để đảm bảo tín hiệu đầu ra ổn định và tính lặp.
+ Được thiết kế để đo độ nghiêng cho các kết cấu chìm theo phương ngang, phương thẳng đứng hay phương nghiêng. Chúng được gắn lên kết cấu bằng cách hàn, bắt vít, dán trực tiếp.
+ Cáp tín hiệu kết nối tới bộ đo hay Datalogger. |
|
4. In-place Tilt Beam |
.png) |
+ Bao gồm 1 GRP hay một thanh dầm thép không gỉ được gắn cảm biến đo nghiêng dạng Mems loại 1 trục hoặc 2 trục ở trên và bảng mạch PCB và được bảo vệ chống nước.
+ Chiều dài thanh dầm tùy biến từ 1,2,3M và có thể ghép đôi với nhau tạo thành chuỗi liên tục với cáp tin hiệu BUSSED.
+ PCB được trang bị một hệ thống điều khiển tín hiệu phức tạp để đảm bảo tín hiệu đầu ra ổn định và tính lặp.
+ Được thiết kế để đo độ nghiêng hay sơ đồ lún cho các kết cấu theo phương ngang, phương thẳng đứng. Chúng được gắn lên kết cấu bằng cách hàn, bắt vít, dán trực tiếp.
+ Cáp tín hiệu kết nối tới bộ đo hay Datalogger. |
II - Nguyên lý hoạt động
MEMS Tilt Sensor sử dụng cộng nghệ cảm biến MEMS hiện đại. MEMS (Micro – Electro – Mechanical Systems) là sự tích hợp của các yếu tô cơ học, cảm biến, thiết bị truyền động và thiết bị điện tử trên đế silicon thông thường thông qua công nghệ chế tạo vi mô.
Cấu tạo cơ học của cảm biến dạng MEMS như sau:
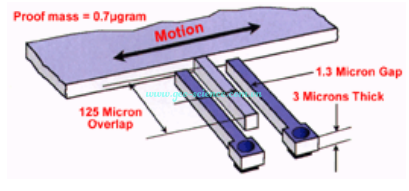
Polysilicon springs giữ cho cấu trúc MEMS ở trên đế sillicon như là thân của cảm biến (được xem như là ‘’ bộ phần di động’’ có thể di chuyển theo trục X và trục Y.
Gia tốc gây ra độ lệch của bộ phận di động từ ví trí trung tâm của nó. Xung quanh 4 hướng của diện tích bộ phận di động là 32 bộ radial fingers. Các fingers này được bố trí giữa các tấm được cố định trên đế sillicon. Mỗi finger và hai tấm lại tạo ra một tụ điện vi sai, và độ lệch của bộ phận di động được xác định bằng cách đo tụ điện vi sai.
Phương pháp này có khả năng cảm nhận cả gia tốc động và gia tốc tĩnh. Sự biến đổi tín hiệu xảy ra bên trong Tilt sensor vì vây rất dễ dàng trong việc thu thập tín hiệu đầu ra. Tín hiệu đầu ra kết hợp với bảng hiệu chuẩn để tính toán chính xác ra độ nghiêng thay đổi.
Cảm biến MEMS bên trong Tilt Meter được cấu hình để đo độ nghiêng theo phương dọc. Khi xảy ra chuyển động, Tilt sensor sẽ di chuyển gắn kết của nó, gây ra sự thay đổi độ nghiêng của cảm biến bên trong.
Cảm biến MEMS bên trong Tilt Meter có khoảng đo ± 15°. Đầu đo loại 2 trục, cảm biến MEMS thứ 2 được gắn vuông góc 90° với cảm biến MEMS thứ 1 và đo được độ nghiêng the0 phương trục giao. Sau khi gắn lên kết cấu thường chúng ta sẽ điều chỉnh số đo về xấp xỉ 0, điểm giữa. Sau đó ghi lại ‘’số đọc ban đầu’’ bất kỳ sự thay đổi về độ nghiêng nào sẽ được xác định bằng cách so sánh số đọc hiện tại với số đọc ban đầu.
Tilt Meter có sẵn với hai loại tín hiệu đầu ra Analog (4-20mA) và Digital (RS-485).
Tilt Beam có sẵn với tín hiệu đầu ra Digital và Digital BUS (RS485).
III - Những ứng dụng điển hình
Tilt Meter và Tilt Beam được dùng để theo dõi sự thay đổi độ nghiêng của kết cấu hay công trình. Sự thay đổi này có thể là do ảnh hưởng của công tác thi công xây dựng như thi công hầm, hố đào, gia tải, hạ mực nước ngầm. Ngoài ra sự thay đổi độ nghiêng cũng xảy ra do những hiện tượng tự nhiên như sạt trượt mái đốc, ảnh hưởng của thiên tai lũ lụt và bão, gió lốc...
Việc lựa chọn loại cảm biến đo nghiêng sẽ phụ thuộc vào từng ứng dụng cụ thể.
1. In-Place Tilt Meter (bao gồm cả loại lắp cho kết cấu chìm)
* Đo độ nghiêng tại vị trí dự đoán xuất hiện chuyển vị xoay
* Có thể phát hiện ra nhiều chuyển động khác biệt (nhiều đơn vị) nhưng không phải chuyển vị tuyệt đối
* Có thể được gắn với giá đỡ trên bề mặt thẳng đứng, nghiêng hoặc ngang.
* Giá đỡ có thể gắn trên nhiều loại bề mặt như bê tông, thép...
* Giá đỡ có thể gắn lên kết cấu bằng cách hàn, dán, bắt vít
* Giá đỡ được thiết kết phù hợp cho từng điều kiện áp dụng khác nhau (tùy biến theo yêu cầu)
* Cảm biến digital có thể kết nối BUS và chỉ cần dùng một cáp tín hiệu chung cho nhiều cảm biến
* Có thể kết nối tới các trạm đo không dây như là một phần của hệ thống quan trắc không dây
* Có thể được đo thủ công bằng máy đo cầm tay hoặc kết nối tới hệ thống quan trắc tự động
2. Portable Tilt Meter
* Đo độ nghiêng tại vị trí dự đõauất hiện chuyển vị xoay
* Có thể phát hiện ra nhiều chuyển động khác biệt (nhiều đơn vị) nhưng không phải chuyển vị tuyệt đối
* Đĩa đo nghiêng được gắn lên kết cấu theo phương đứng, phương nghiêng hay phương ngang
* Đĩa đo nghiêng có thể gắn được trên nhiều loại kết cấu khác nhau như bê tông, thép...
* Đặt máy đo nghiêng lên đĩa đo nghiêng để thao tác đo và thu dữ liệu
* Đề xuất hộp bảo vệ cho đĩa là cần thiết
3. Tilt Beam
* Mỗi một tilt beam đo độ nghiêng trên chiều dài của thanh dầm của nó được tính toán dựa trên góc xoay
* Chuỗi Tilt Beam được sử dụng để đo profile chuyển dịch
* Có sẵn với chiều dài thanh dầm từ 1,2,3 M
* Với một hoặc hai đầu được cố định, có thể tính toán độ dịch chuyển tuyệt đối
* Có thế gắn cùng với giá đỡ theo phương đứng, phương nghiêng hay phương ngang
* Có thể gắn trên nhiều loại kết cấu khác nhau như bê tông, thép
* Có thế gắn lên kết cấu bằng cách hàn, dán, bắt vít
* Cảm biến digital có thể kết nối BUS và chỉ cần dùng một cáp tín hiệu chung cho nhiều cảm biến
* Có thể kết nối tới các trạm đo không dây như là một phần của hệ thống quan trắc không dây
* Có thể được đo thủ công bằng máy đo cầm tay hoặc kết nối tới hệ thống quan trắc tự động
4. Hệ thống đo nghiêng
* Cảm biến đo nghiêng 2 phương được liên kết theo phương dọc để đo góc xoay của mỗi thanh dầm được cố định ở hai đầu theo trục A
* Kết hợp các độ nghiêng đó tạo ra một profile lún.
* Độ xoắn theo trục B tại điểm cố định cũng được theo dõi do đó có thể tính toán thay đổi tại những vị trí đó.
* Có sẵn với chiều dài thanh dầm từ 1,2,3M
* Với một hoặc hai đầu được cố định, có thể tính toán độ dịch chuyển tuyệt đối
* Có thể gắn trên nhiều loại kết cấu khác nhau như bê tông, thép
* Có thế gắn lên kết cấu bằng cách hàn, dán, bắt vít
* Cảm biến digital có thể kết nối BUS và chỉ cần dùng một cáp tín hiệu chung cho nhiều cảm biến
* Có thể kết nối tới các trạm đo không dây như là một phần của hệ thống quan trắc không dây
* Có thể được đo thủ công bằng máy đo cầm tay hoặc kết nối tới hệ thống quan trắc tự động
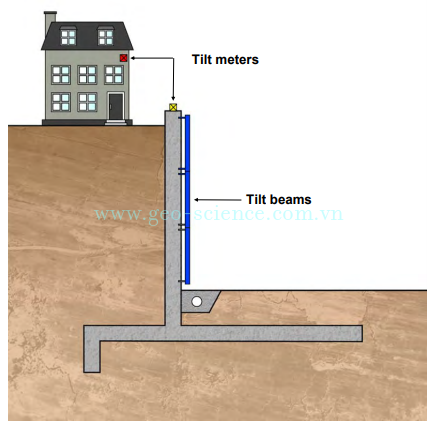
Tường chắn
Tilt Meter và Tilt Beam được sử dụng để đo chuyển dịch và độ ổn định trước, trong và sau khi thi công của tường chắn, và theo dõi chuyển dịch của các công trình, kết cấu xung quanh.
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Bề mặt tường chắn |
|
|
|
Quan trắc profile nghiêng |
Để phát hiện (tính toán và đánh giá) độ uốn để xác định tính toàn vẹn (ổn định) của tường |
|
|
Đỉnh tường chắn |
|
|
|
Quan trắc nghiêng |
Để phát hiện ( tính toán và đánh giá) chuyển vị xoay của tường |
|
|
Kết cấu/Công trình lân cận |
|
|
|
Quan trắc nghiêng |
Để phát hiện ( tính toán và đánh giá) chuyển vị xoay của kết cấu/công trình lân cận |
Hệ thống hạ mực nước ngầm
Đánh giá sự thay đổi độ lún khi tiến hành hoạt động hạ mực nước
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Công trình lân cận |
|
|
|
Profile nghiêng (Tilt Beam)
Quan trắc nghiêng |
Quan trắc ảnh hưởng của việc hạ mực nước ngầm và ảnh hưởng sự chênh lệch độ lún |
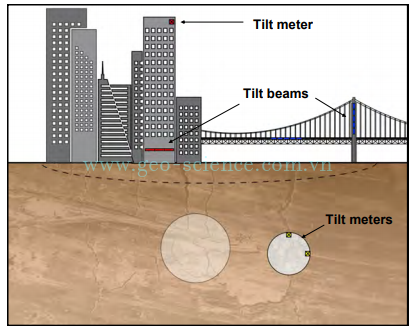
Thi công hầm xây mới
Hoạt động thi công hầm đặc biệt là trong khu vực nội thành có thể dẫn đến độ lún lớn của đất ảnh hưởng tới tính nguyên vẹn của kết cấu/công trình lân cận.
Để giảm thiểu ảnh hưởng của lún sụt của kết cấu, phương pháp bù vữa thường được sử dụng.
Tilt Meter cung cấp điểm xoay thường được sử dụng để xác định góc xoay của kết cấu. Tilt Beam có thể liên kết được với nhau thành chuỗi cho profile lún thường được sử dụng đểkiểm soát quá trình bù vữa.
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Công trình lân cận |
|
|
|
Quan trắc nghiêng |
Đo điểm để đưa ra cảnh báo sớm về sự dịch chuyển của kết cấu
Quan trắc profile để tính toán và kiểm soát lún |
|
|
Cơ sở hạ tầng bên dưới mặt đất
(đường ray,cống, đường điện, đường ống nước) |
|
|
|
Quan trắc nghiêng |
Quan trắc profile để tính toán và kiểm soát độ lún/trồi |
|
|
Mạng lưới giao thông trên bê mặt
(đường sắt, đường bộ) |
|
|
|
Quan trắc nghiêng |
Đo điểm để phát hiện chuyển vị quay và hội tụ
Đo điểm để đưa ra cảnh báo sớm về sự dịch chuyển của kết cấu
Quan trắc profile để tính toán và kiểm soát độ lún/trồi |
Thi công hầm đã có sẵn
Việc thi công các hâm mới, đặc biệt trong các khu đô thị thường tiếp giáp với các đường hầm hiện có do đó cần quan trắc ảnh hưởng của việc thi công hầm.
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Vỏ hầm – Tilt Beam theo phương dọc |
|
|
|
Quan trắc nghiêng |
Quan trắc profile nghiêng để tính toán hội tụ |
|
|
Vỏ hầm – Tilt Beam theo phương ngang |
|
|
|
Quan trắc nghiêng |
Quan trắc profile để tính toán và kiểm soát độ lún/trồi |
Quan trắc uốn/chuyển vị
Tilt Beam được sử dụng để quan trắc độ uốn (chuyển vị) do tải trọng tác dụng lên kết cấu/công trình như cầu, giá treo, tua bin gió, tháp, silo và cột buồm.
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Bản mặt cầu |
|
|
|
Quan trắc nghiêng |
Tính toán uốn (chuyển vị) của bản mặt cầu |
|
|
Trục ầu, tuabin gió, tháp, silo & cột buồm |
|
|
|
Quan trắc nghiêng |
Quan trắc tính toàn vẹn và ổn định của kết cấu khi có tải trong tác dụng |
Sạt trượt / lát cắt địa chất
Tilt Beam được sử dụng để quan trắc nghiêng của công trình/kết cấu tại khu vực nơi mái dốc không ổn định có thể theo dõi và dự đoán ảnh hưởng của các biện pháp giữ ổn định như nền móng đất.
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Kết cấu/công trình lân cận |
|
|
|
Quan trắc nghiêng |
Để phát hiện (tính toán và theo dõi) chuyển vị xoay của các kết cấu/công trình xung quanh đưa ra những cảnh báo sớm về sự không ổn định của mái dốc |
Quan trắc đường ray
Cảm biến đo nghiêng 2 trục có thể được liên kết với nhau thành chuỗi bằng các thanh nối, được cố định nhưng vẫn di chuyển tương đối với nhau để có thể theo dõi profile lún.
|
|
Vị trí và yếu tố cần quan trắc |
Tại sao cần quan trắc |
|
|
Đường ray |
|
|
|
Quan trắc nghiêng |
Tính toàn vẹn và hình dạng của đường ray là điều tối quan trọng đối với vận hành một tuyến đường sắt an toàn
Theo dõi Cant là một trong những phương pháp chính để kiểm tra hình học
Quan trắc tính toán sự thay đổi Cant tính toàn vẹn của kết cấu và ổn định của đường ray |
IV – Số đo cảm biến đo nghiêng
1. Tín hiệu đầu ra
Số đọc từ cảm biến đo nghiêng Analog là dòng (current)
+ Current: 4mA – 20mA cho -15 degrees đến +15 degrees
Nguồn cấp cho Tilt Meter là 8 – 15V (2 dây). Với tín hiệu đầu ra từ 4mA tại 15 degrees theo chiều âm với trục đo, đến 20mA tại 15 degrees theo chiều dương của trục đo. Số đọc current sau đó được chuyển đổi thành góc theo công thức tuyến tính được cung cấp trong bản hiệu chuẩn chi tiết.
Số đọc từ cảm biến đo nghiêng Digital là ‘’ Sin của góc’’
+ Digital: -0.2588 sin-1 đến +0.2588 sin-1
Nguồn cấp cho Tilt meter là từ 8 – 15V để cấp nguồn cho bộ xử lý bên trong và các cảm biến thống qua cáp RE-485 BUS. Mỗi cảm biến sẽ có một nhận dạng ‘’ địa chỉ’’ duy nhất. Thiết bị đọc dữ liệu sẽ yêu cầu dữ liệu từ một ‘’ địa chỉ ‘’ cụ thể. Giá trị trả lại bộ xử lý là giá trị sin-1 (sin của góc so với phương thẳng đứng) sẽ được chuyển đổi thành số đọc theo degrees hoặc đơn vị kỹ thuật khác.
2. Chuyển đổi tín hiệu
Analog
Mỗi tilt beam hay tilt meter có bảng hiệu chuẩn riêng và công thức chuyển đổi từ tín hiệu đầu ra cảm biến thành đơn vị kỹ thuật, thông thường từ degrees hay mm/metre. Tín hiệu đầu ra từ cảm biến phải được so sánh với hệ số hiệu chuẩn của cảm biến – dưới đây là hệ số hiệu chuẩn điển hình trên bảng hiệu chuẩn:
Hệ số hiệu chuẩn: 0.03234 mA to Sin θ
1.87418 mA to Degrees θ
33.4937 mA to mm/m
Digital
Mỗi tilt beam hay tilt meter sẽ được hiệu chuẩn riêng nhưng được thiết lập vào bên trong cảm biến nên tín hiệu đầu ra đã được chuyển đổi thành sin θ.
Miliamps reading thành mm/m
Công thức chuyển đổi từ tín hiệu đầu ra miliamps thành mm/m, một lần nữa, dựa vào quan hệ tuyến tính Y = (M*X) + C, với:
Y: Độ lệch lý thuyết từ phương thẳng đứng với khoảng cách 1m so với phương thẳng đứng
M: Hệ số hiệu chuẩn ( cho mm/m, lấy từ bảng hiệu chuẩn)
X: Số đọc Miliamps
C: Số đọc ban đầu ( lấy từ bảng hiệu chuẩn)
Ví dụ:
M = 32.3524 mỗi mA
X = 14.974 mA
C = 12.000 mA tại Zero degrees
Y = (14.974-12.000)*32.3524 = 96.22 mm/m
Số đọc từ cảm biến digital tilt đã được chuyển đổi thành đơn vị kỹ thuật dưới dạng sin của góc nghiêng. Vì vậy không cần áp dụng hệ số hiệu chuẩn nữa.
Để chuyển đổi sang đơn vị kỹ thuật khác (degrees hay mm/m) chỉ cần tính toán đơn giản như sau:
Chuyển đổi từ sin của góc sang góc:
Để chuyển đổi từ sin của góc sang góc cần sử dụng hàm Arcsin hay Sin-1 :
Y = giá trị đo từ tilt meter ( sin của góc nghiêng) – ví dụ là 0.08716
Góc nghiêng theo degrees = Y(0.08716)Sin-1
Góc nghiêng = 5.0000
Chuyển đổi từ sin của góc sang mm/m
Y = giá trị đo từ tilt meter ( sin của góc nghiêng) – ví dụ là 0.08716
mm/m = Y(0.08716) x 1000
Góc nghiêng = 87.16mm/m